
✨ About Me
I am currently pursuing a PhD at the School of Computer Science and Technology, University of Science and Technology of China (USTC), under the supervision of Prof. Yanyong Zhang, IEEE Fellow, and Assoc. Prof. Jianmin Ji, in the Lab for Intelligent Networking and Knowledge Engineering (LINKE). I received my B.E. degree from Anhui University of Science and Technology (AUST).
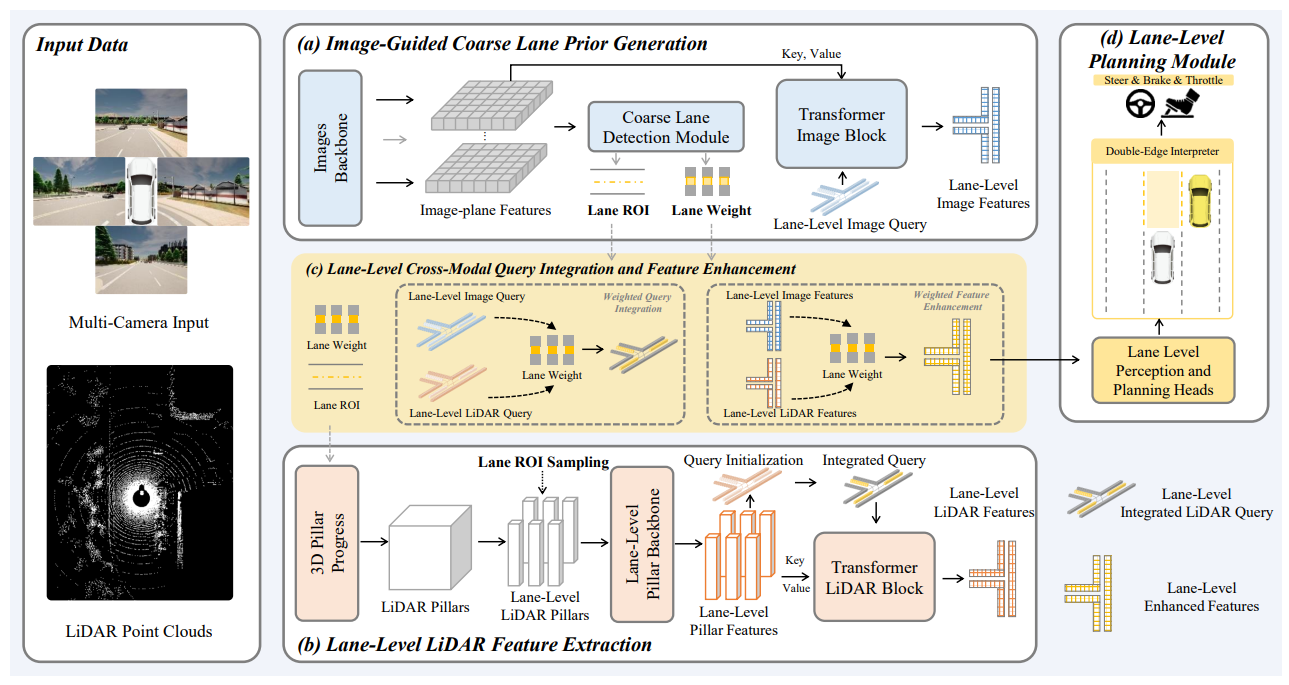
My research interests broadly encompass End-to-End autonomous driving, multi-sensor fusion perception, reinforcement learning, and Embodied AI. Recently, my work has focused on developing learning-based end-to-end driving systems, leveraging prompt-based techniques to accelerate model transfer across tasks. I have also been working on designing lane-level perception and planning solutions using purely vision-based approaches through Transformer architectures, which significantly enhance system efficiency. Additionally, I explore sparse multi-sensor fusion, particularly integrating LiDAR and camera data, to improve both perception accuracy and planning efficiency, thus optimizing the overall performance of autonomous systems. Furthermore, I am exploring the application of Vision-Language Models (VLMs) in intelligent systems, particularly in autonomous driving and robot manipulation, as part of our broader efforts to advance Embodied AI driven by large-scale foundation models.
Download my CV.
🔥 Recent News
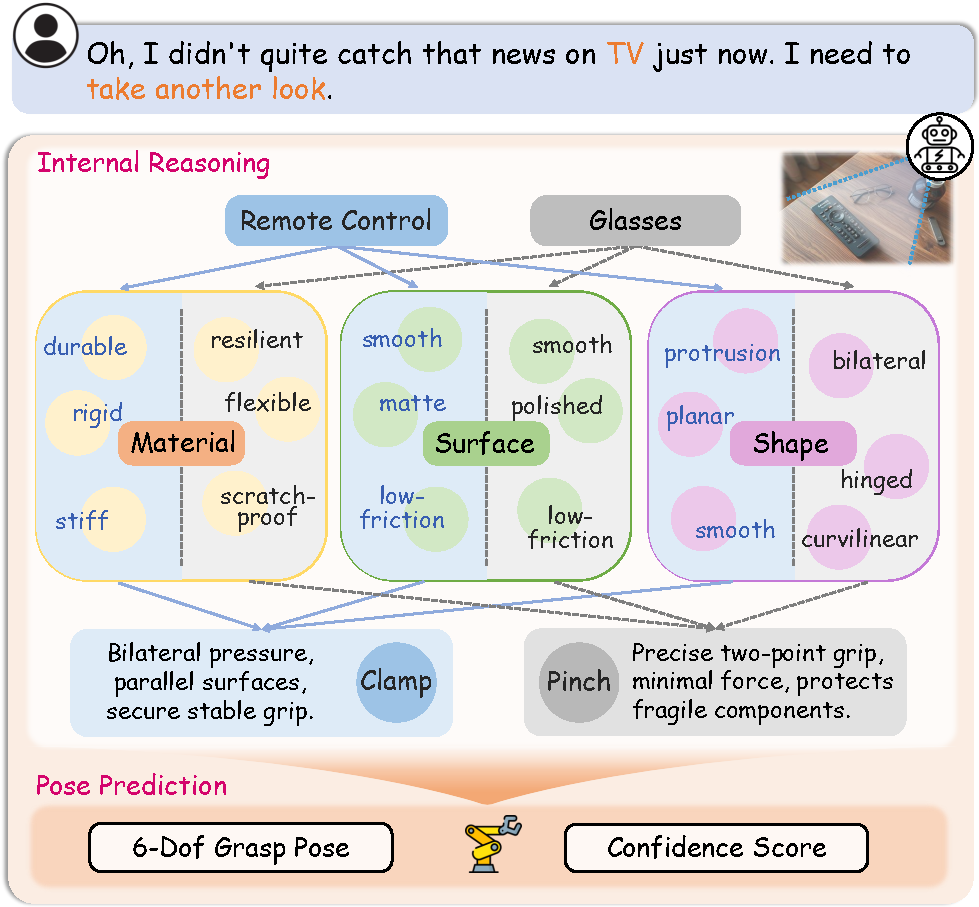
- 2025.03.20: Our paper GraspCoT has been posted on ArXiv (arXiv:2503.16013)!
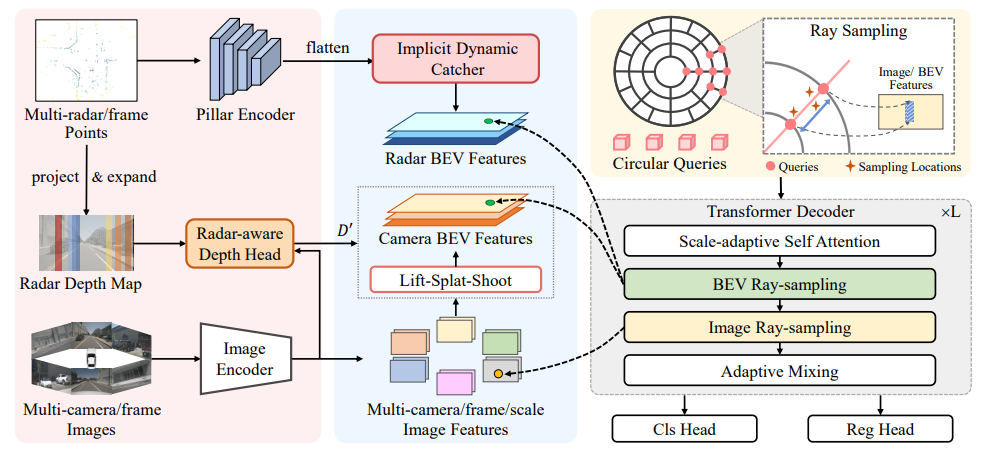
- 2025.02.27: Our paper RaCFormer is accepted by CVPR!
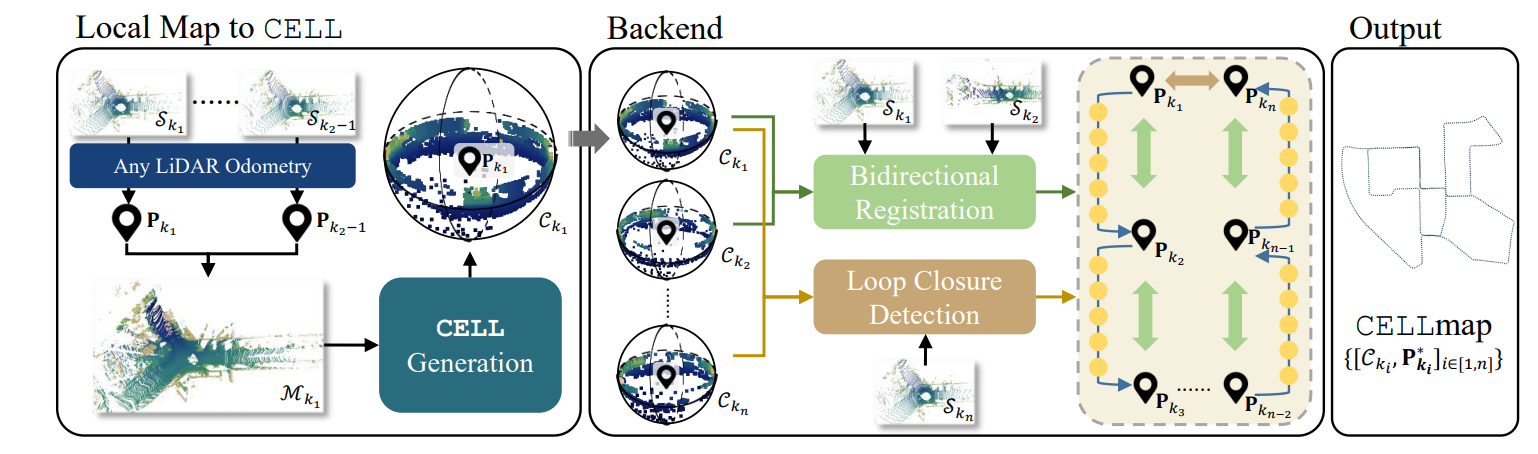
- 2025.01.28: Our paper CELLmap is accepted by ICRA!
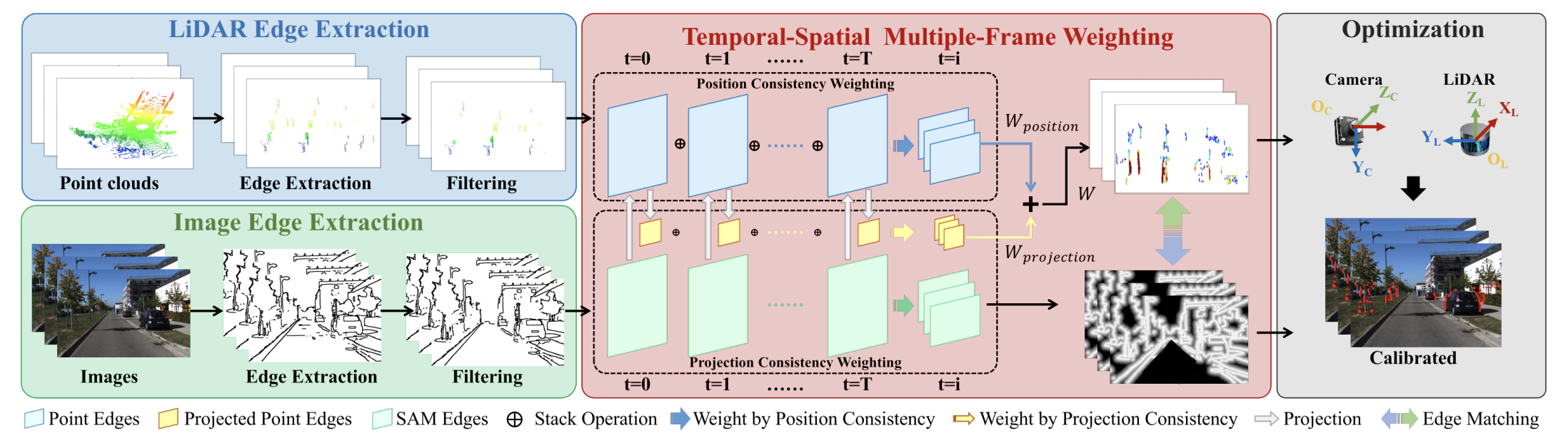
- 2025.01.28: Our paper EdgeCalib is accepted by ICRA!
- 2024.12.07: Our paper RaCFormer has been posted on ArXiv (arXiv:2412.12725)!
- 2024.12.02: Our paper PHP is accepted by RA-L!
- 2024.09.29: Our paper CELLmap has been posted on ArXiv (arXiv:2409.19597)!
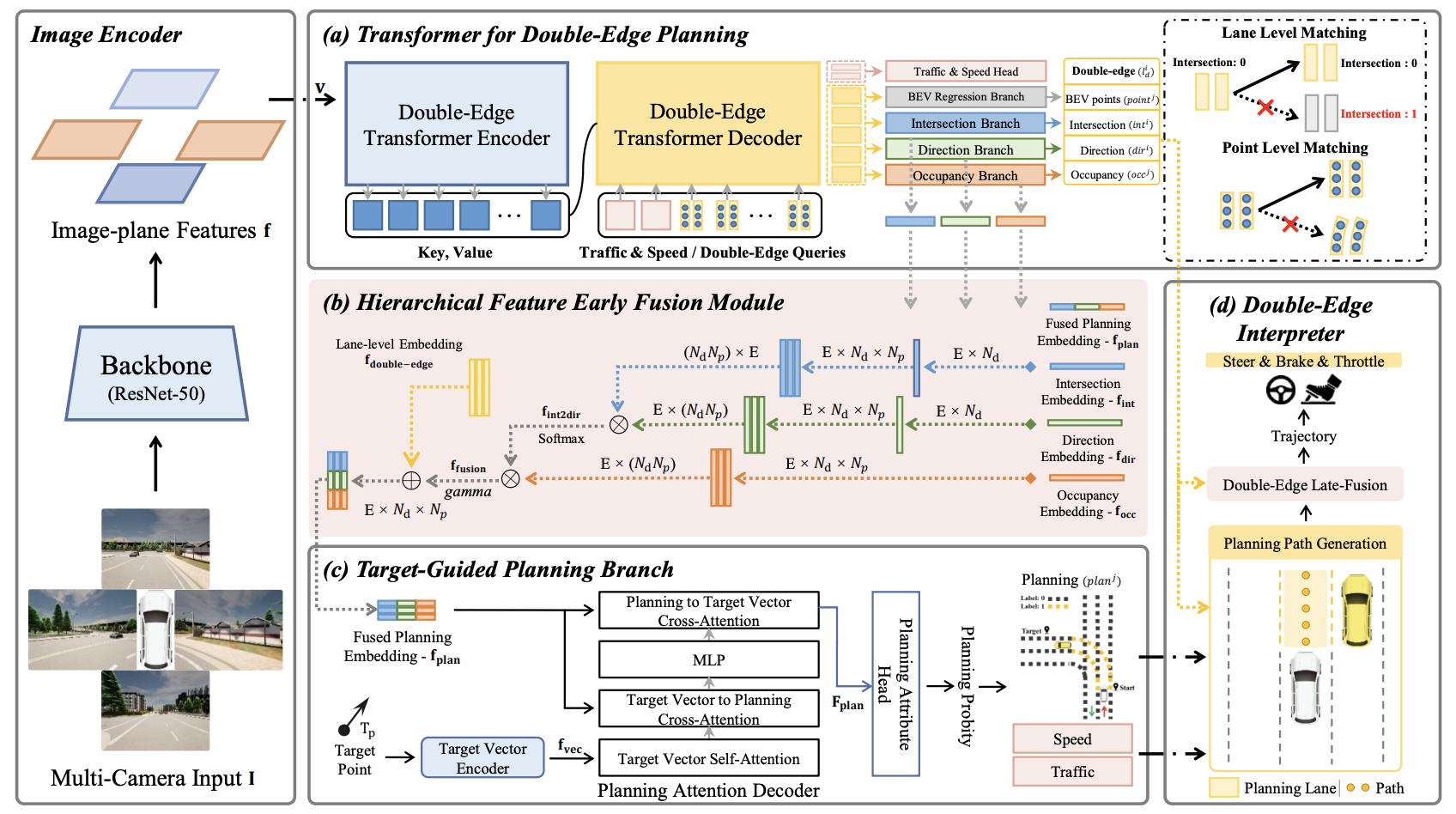
- 2024.09.21: Our paper LFP has been posted on ArXiv (arXiv:2409.14170)!
- 2024.08.14: Our paper EdgeCalib is accepted by RA-L!
- 2024.07.16: Our paper RayFormer is accepted by ACMMM 2024!
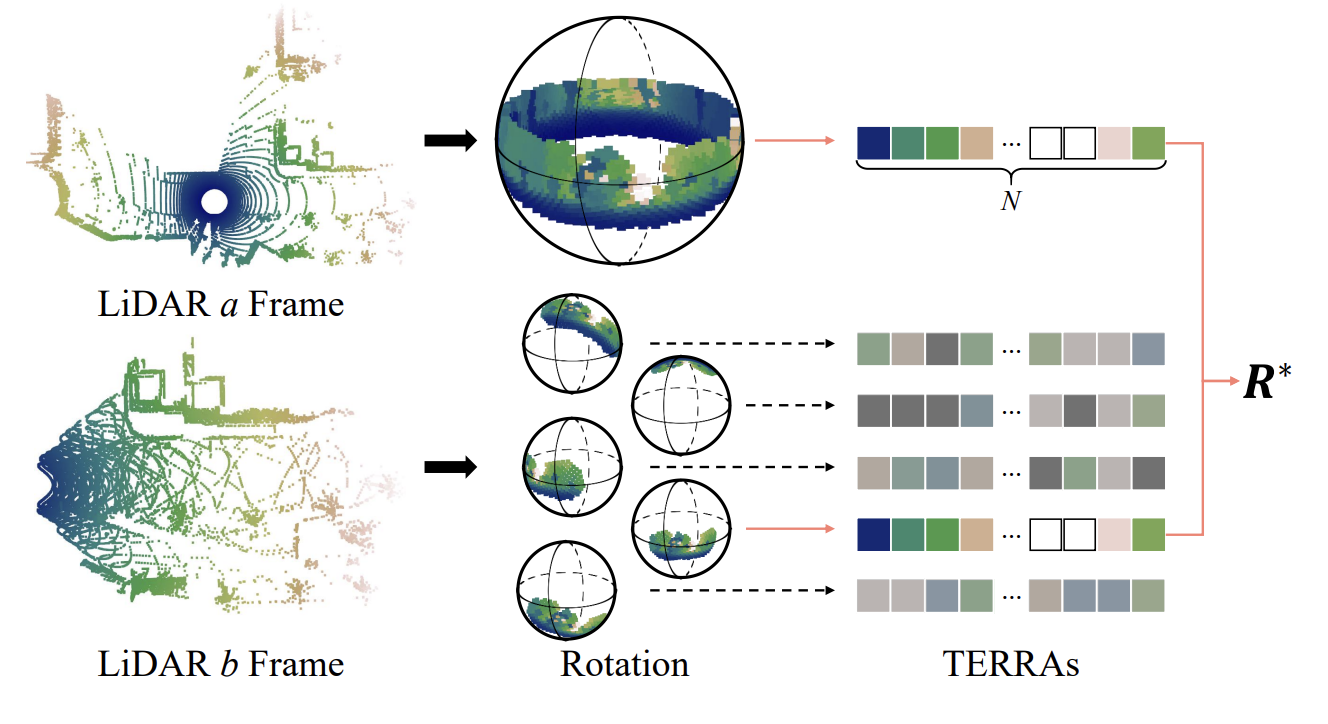
- 2024.05.09: Our paper TERRA has been posted on ArXiv (arXiv:2405.05589)!
- 2023.03.13: Our paper $P^3O$ is accepted by ICME 2023!
📝 Publications
* Corresponding author.


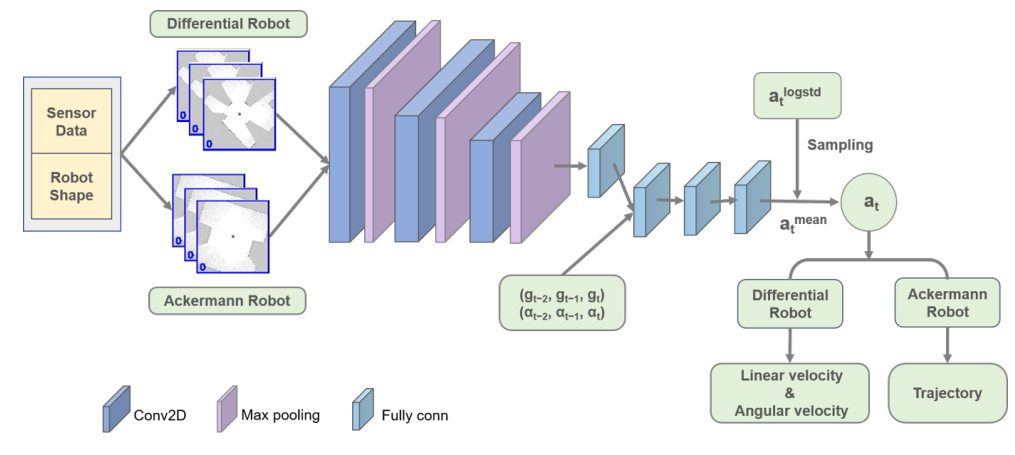
- Collision Avoidance for An Ackermann-Steering Vehicle via Map-Based Deep Reinforcement Learning
-
Guoliang You, Yujie Yang, Tingting Jiang, Xu Li, Xingchen Li, Jianmin Ji *, Yanyong Zhang
🧑🎨 Participated Grants
- National Key Research and Development Program of China under Grants No.2018AAA0100500
- National Key Research and Development Program of China under Grants No.2023YFB4704500
- National Natural Science Foundation of China under Grants No.62332016
- Guangdong Province Research and Development Program under Grants No.2020B0909050001
- Hunan Province Major Scientific and Technological Program under Grants No.2024QK2001
💻 Internships


- Artificial Intelligence Research Institute, Hefei Comprehensive National Science Center
- Research Intern: Multimodal End-to-End AI Algorithms
- Feb 2022 - Jan 2023 Hefei, China
- I contributed to a lifelong learning-based autonomous driving project, focusing on developing an end-to-end perception and planning system using deep learning. The system integrates multi-sensor data (LiDAR, cameras) and utilizes reinforcement learning and imitation learning to optimize vehicle decision-making and planning. My role included system design, model training, optimization, and deployment in an autonomous vehicle. The system continuously enhances its perception and planning, improving safety and efficiency.
💬 Talks

- Global Open-Source Innovation Meetup
- Demonstration and Validation of V2X Collaboration Systems in Carla Simulation
- Sept 23, 2023, 3:00 PM Shanghai, China
- I have been invited to present at GOSIM Workshop to introduce my PhD work on simulation modeling for V2X collaborative scenarios. This includes real-world data collection and the construction of simulation environments based on these data, specifically designed for large-scale V2X collaboration scenarios. These simulation environments are capable of providing data from dozens of LiDARs and cameras, while also supporting algorithm testing.
🏆 Awards
- Sept 2024 Awarded the PhD Academic Scholarship (Second Class) from the University of Science and Technology of China (USTC) in 2024.
- Sept 2023 Awarded the PhD Academic Scholarship (First Class) from the University of Science and Technology of China (USTC) in 2023.
- Sept 2022 Awarded the PhD Academic Scholarship (Second Class) from the University of Science and Technology of China (USTC) in 2022.
- Sept 2021 Awarded the PhD Academic Scholarship (Second Class) from the University of Science and Technology of China (USTC) in 2021.
📚 Services
- Mar 2022 Teaching Assistant, Computer Architecture Course - University of Science and Technology of China (USTC)
- Aug 2021 Volunteer, ACM China Turing Conference - Association for Computing Machinery (ACM)
- Mar 2021 Teaching Assistant, Computer Architecture Course - University of Science and Technology of China (USTC)
- Sept 2020 Teaching Assistant, Deep Reinforcement Learning Course - University of Science and Technology of China (USTC)
- Jul 2020 Volunteer, USTC Information Intelligence Summit Forum - University of Science and Technology of China (USTC)
- Oct 2019 Volunteer, Google TF+ Open Source Technologies and High-Performance Computing Seminar - Google
⛄ Fun Toys

First-generation autonomous vehicle platform, personally led by me.

Second-generation autonomous vehicle platform with upgraded sensors.

Autonomous platform for special Tunnel scenarios.
Single-arm robotic platform (Kinova - Purchased).

Dual-arm robotic platform (Galaxea - Purchased).

Involved in developing a drone-robotic arm grasping platform.
